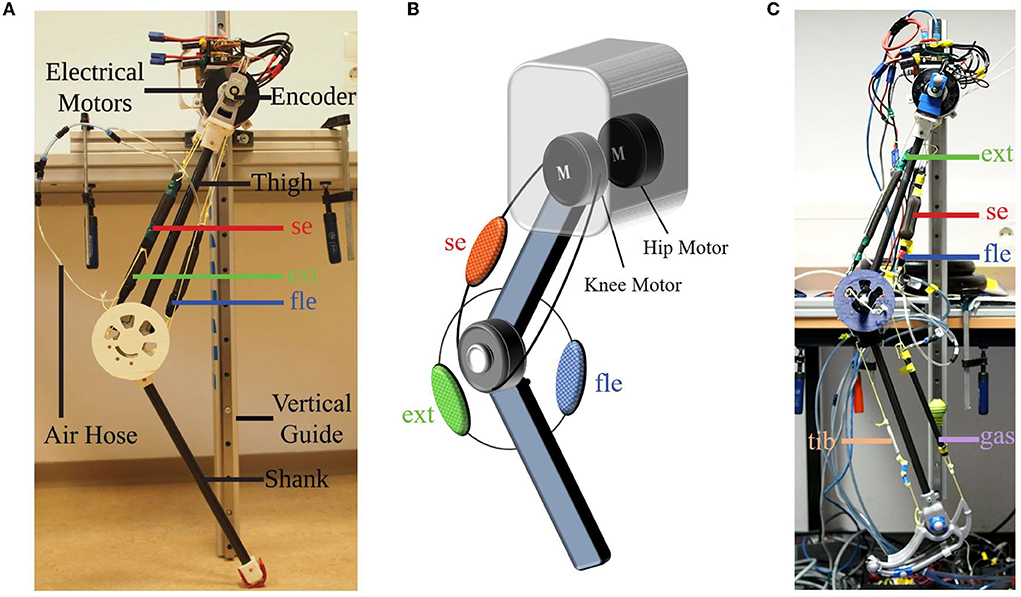
The two-segment leg has a torque-controlled actuator at the hip, and a


AIM2020 Quasi-Direct Drive Actuation for a Lightweight Hip

Sistema de classificação de cores composto por um conjunto de redes
Frontiers Exploring the effects of serial and parallel

Mechanism, Actuation, Perception, and Control of Highly Dynamic

Frontiers A Wearable Soft Robotic Exoskeleton for Hip Flexion
Robotics, Free Full-Text

PDF] High compliant series elastic actuation for the robotic leg

Stable running with a two-segment compliant leg

A Control Strategy for Pneumatically Powered Below-Hip Orthosis

The two-segment leg has a torque-controlled actuator at the hip
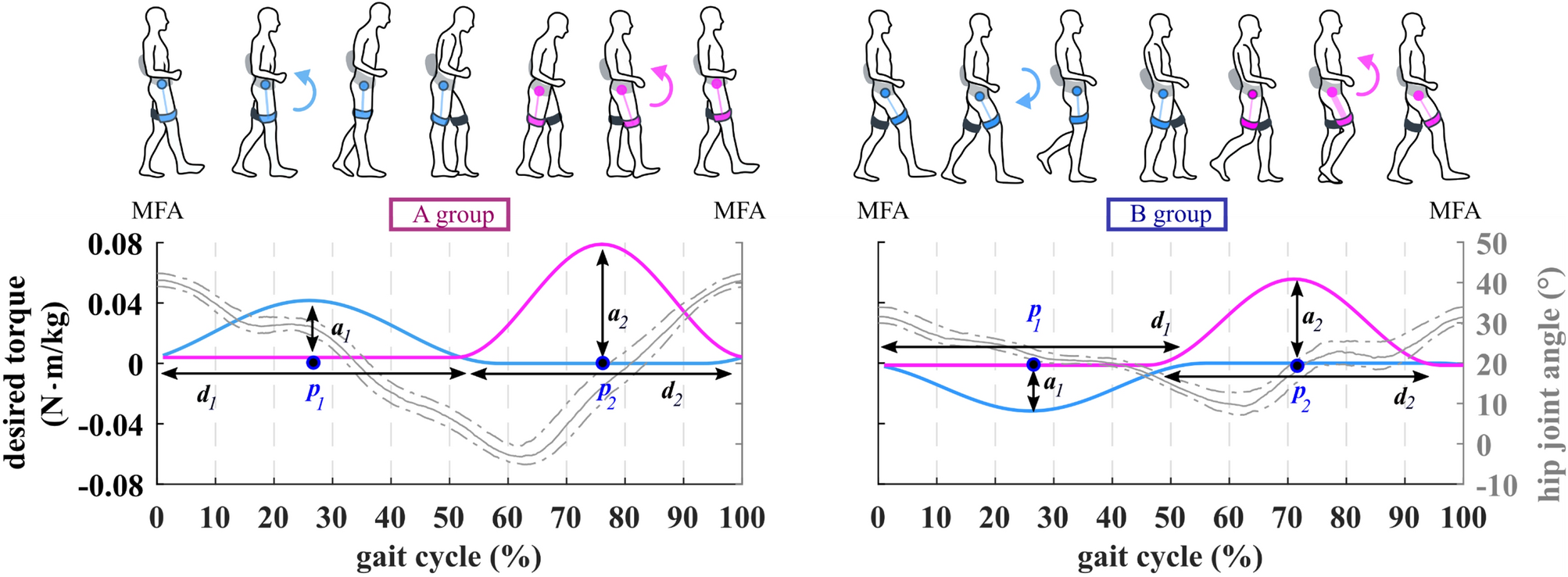
An impairment-specific hip exoskeleton assistance for gait

Robots' physical environment

Stable running with a two-segment compliant leg

Alborz AGHAMALEKI SARVESTANI, R&D Scientist, Master of Science, ABB, Zürich, ABB, A1
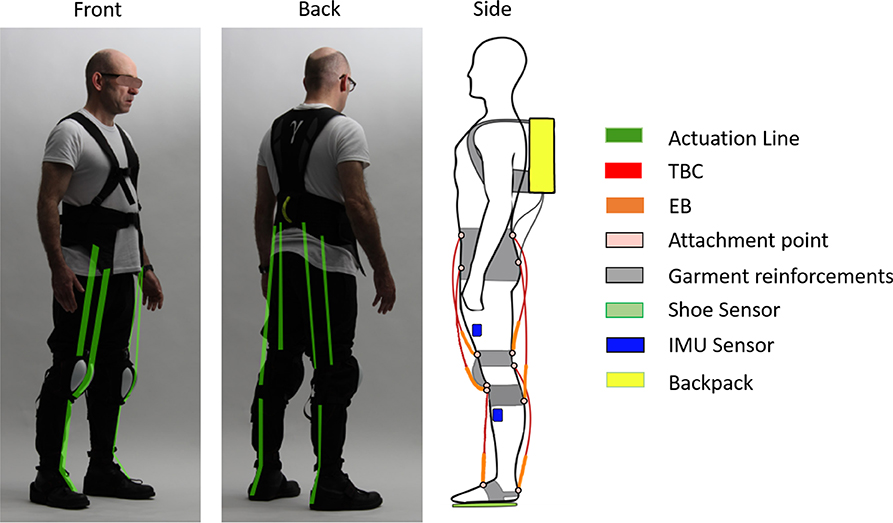
Frontiers Pneumatic Quasi-Passive Actuation for Soft Assistive